目录
向量与线性代数
阅读材料:参考书第2章(Miscellaneous Math), 第5章(Linear Algebra)
图形学依赖于:
- 基本的数学: 线性代数,微积分,统计学
- 基本的物理: 光学, 机械
- 其它: 信号处理, 数值分析
- 一定的美学
这一门课程大部分依赖于线性代数,包括向量(点乘,叉乘,…),矩阵.
一些基本的观点, 一个点可以表示为向量;翻转旋转物体等操作可以表现为矩阵-向量的乘积运算
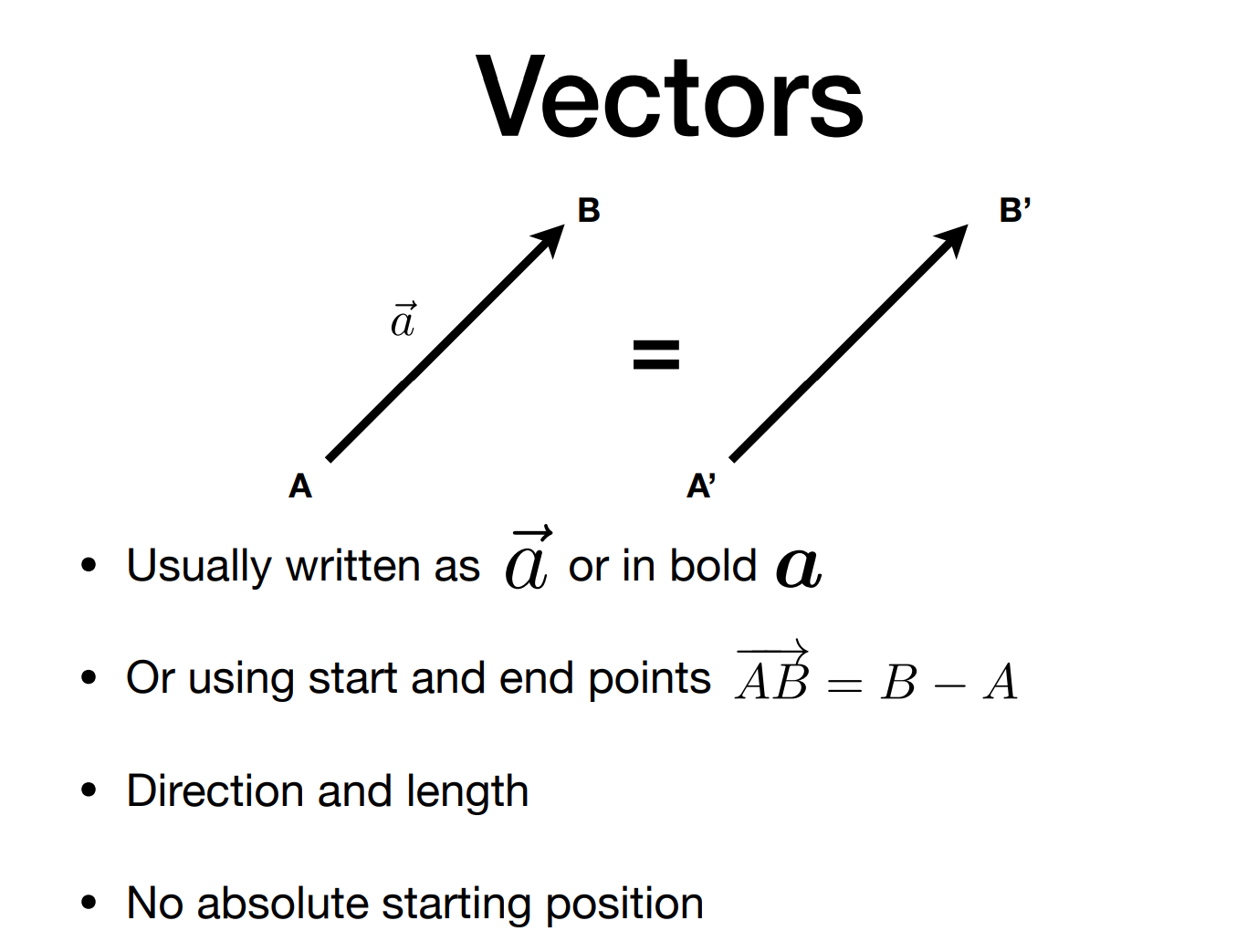
向量Vector
1. 向量的表示
- 字母上面加箭头 $\vec{a}$ 或者黑体加粗 $\boldsymbol{a}$
- 使用起点和终点:$\vec{AB} = B - A$
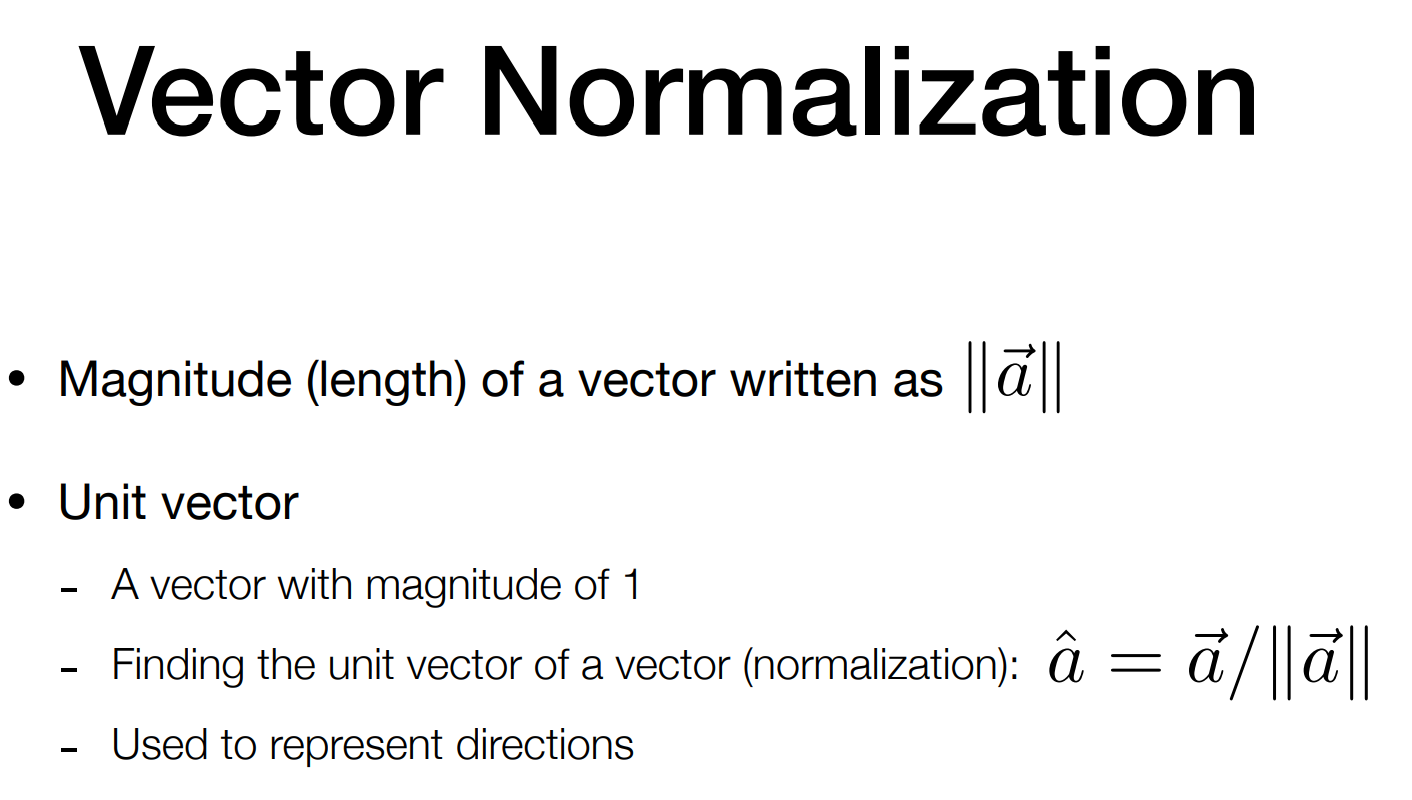
2. 向量长度与单位向量
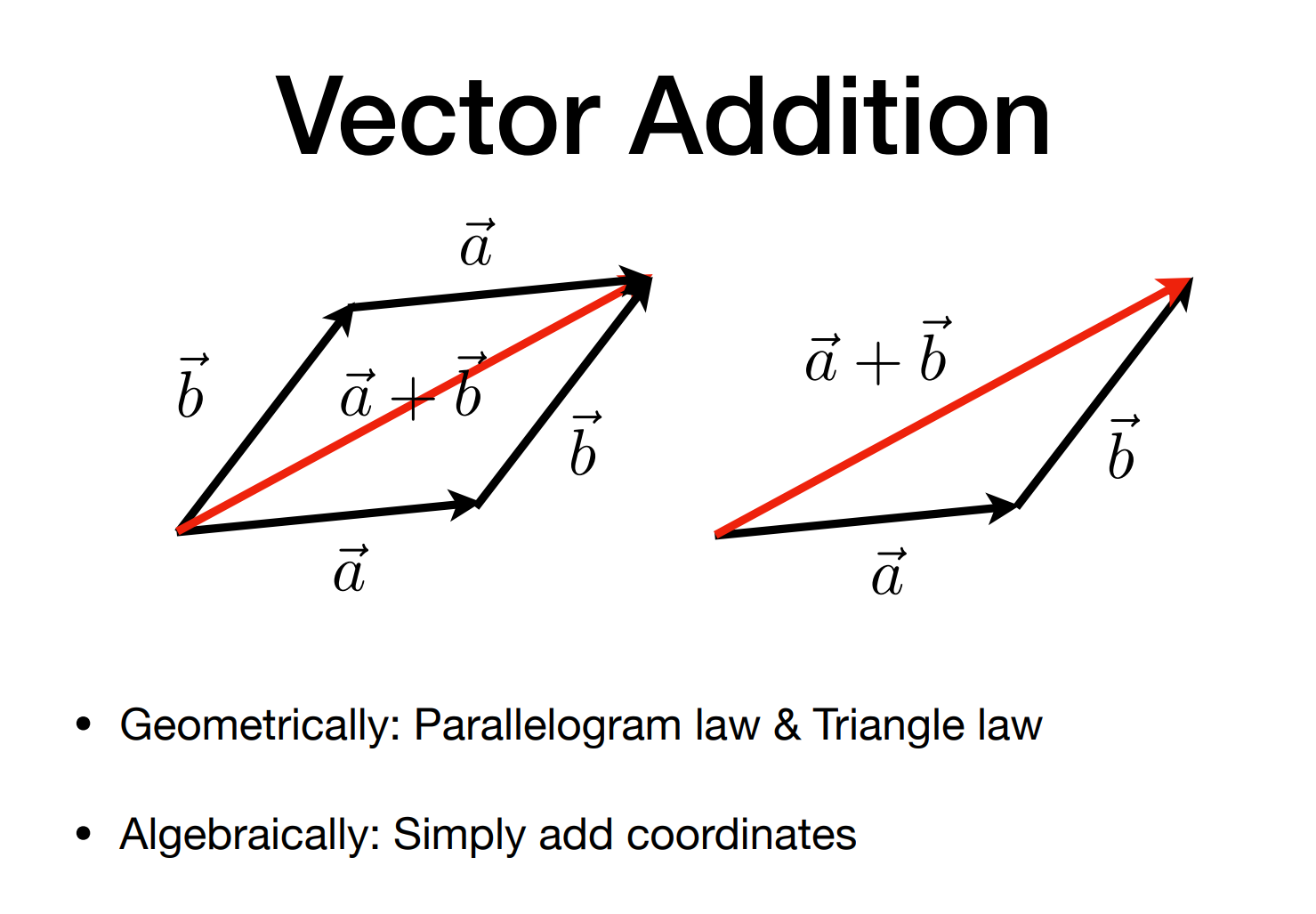
3. 向量加法(四边形法则与三角形法则)
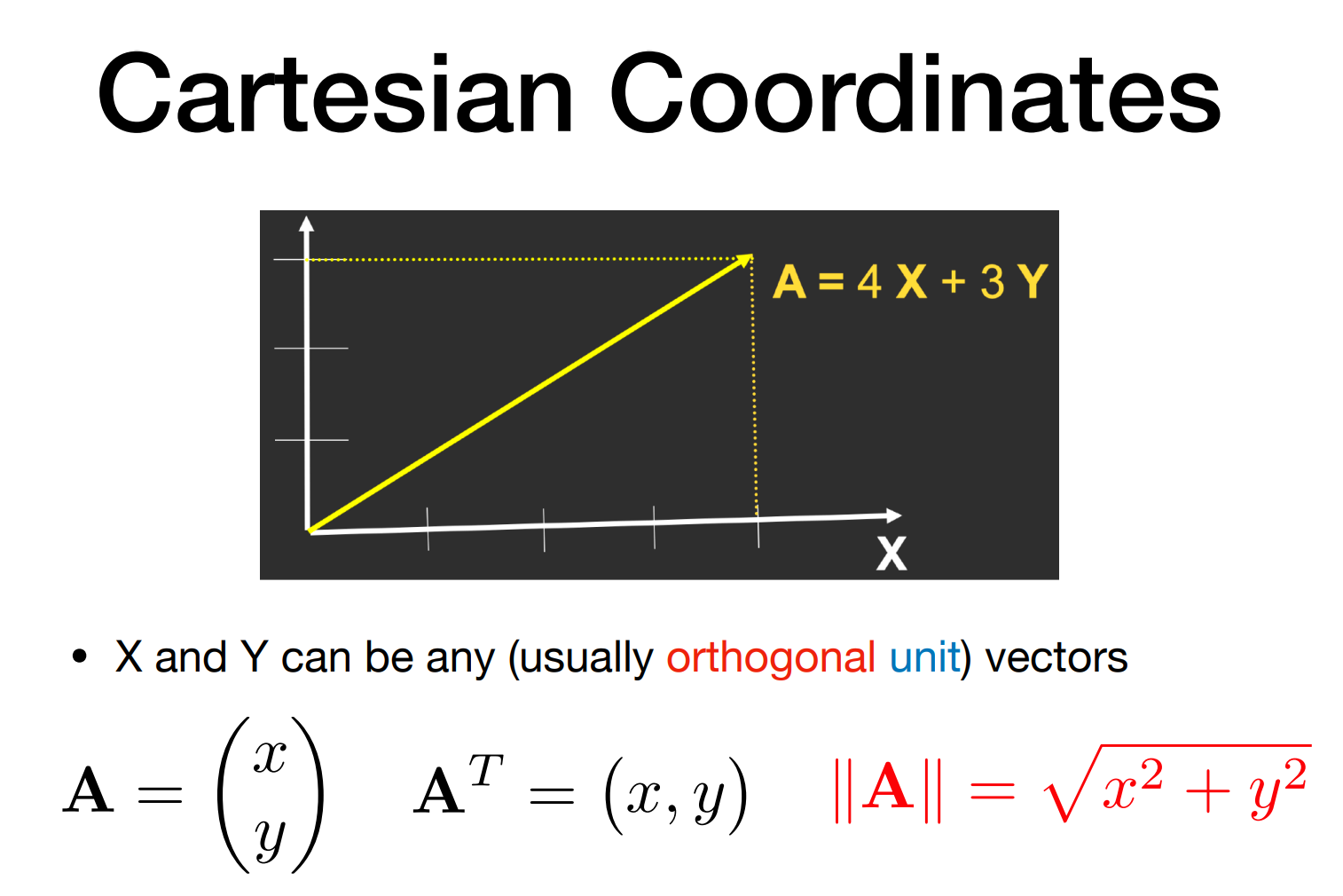
4. 笛卡尔坐标下向量的表示
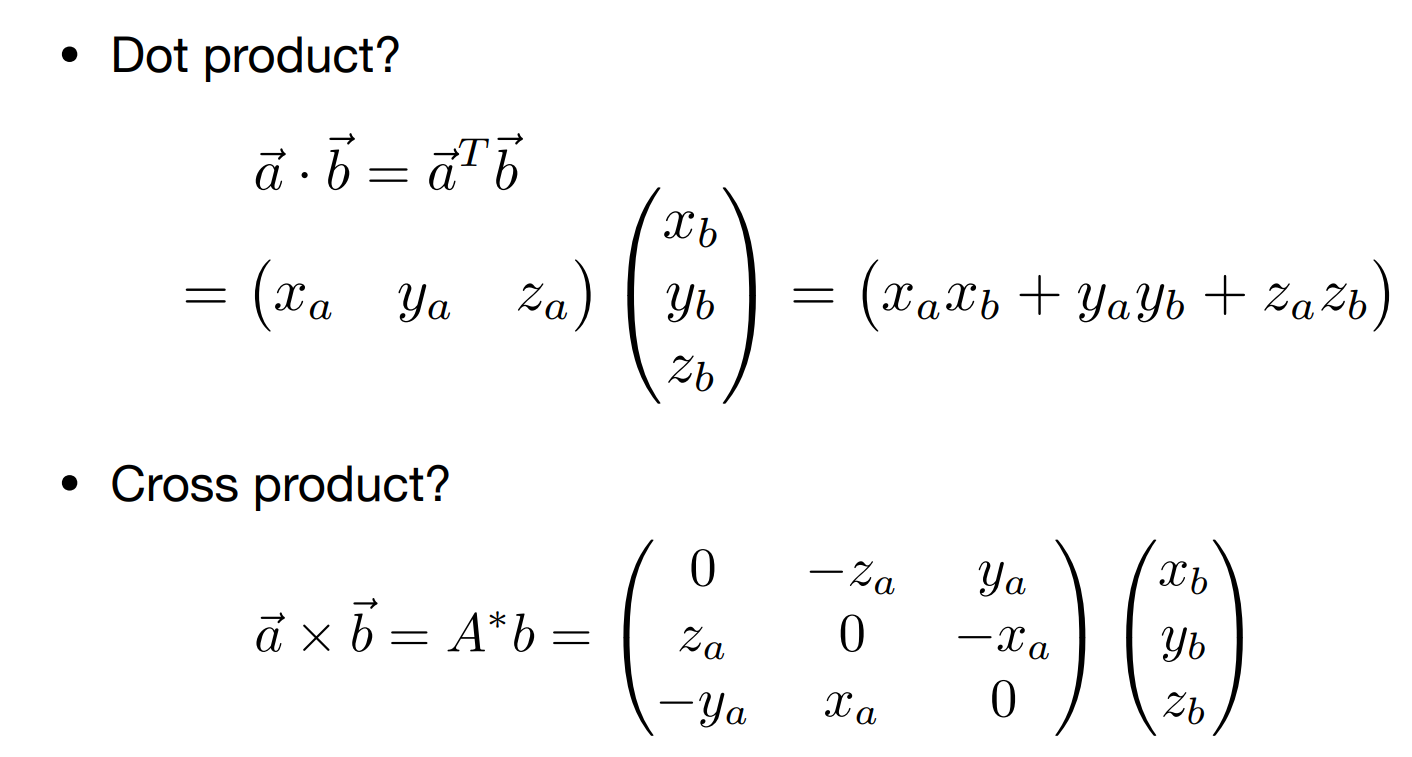
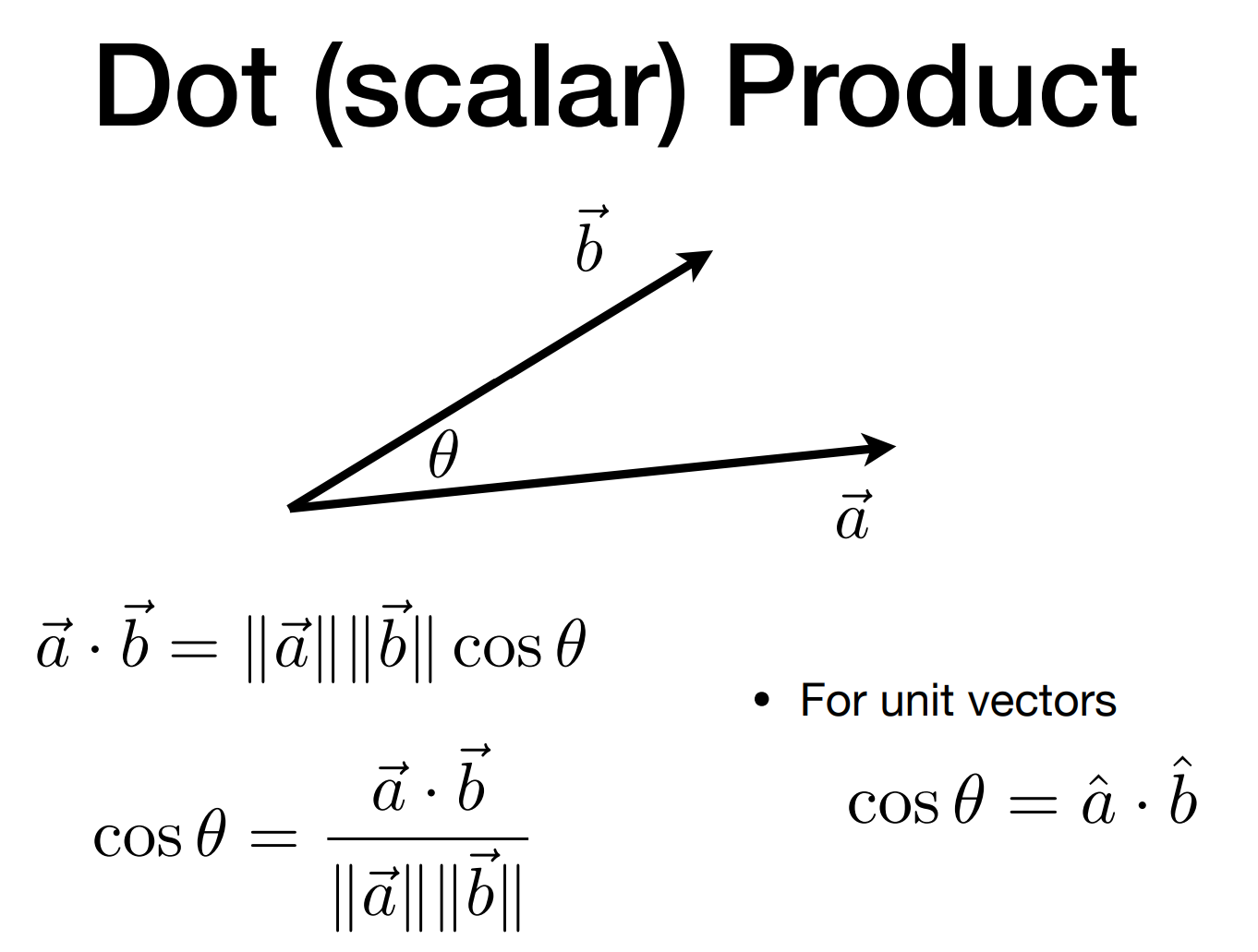
5. 向量点乘dot product
\[\vec{a} \cdot \vec{b}=\|\vec{a}\|\|\vec{b}\| \cos \theta \\ \cos \theta=\frac{\vec{a} \cdot \vec{b}}{\|\vec{a}\|\|\vec{b}\|}\]- 对于单位向量 $\cos \theta=\hat{a} \cdot \hat{b}$
-
性质 \(\begin{array}{l} \vec{a} \cdot \vec{b}=\vec{b} \cdot \vec{a} \\ \vec{a} \cdot(\vec{b}+\vec{c})=\vec{a} \cdot \vec{b}+\vec{a} \cdot \vec{c} \\ (k \vec{a}) \cdot \vec{b}=\vec{a} \cdot(k \vec{b})=k(\vec{a} \cdot \vec{b}) \end{array}\)
-
笛卡尔坐标系下点乘的表示(逐个分量做乘法,然后相加)
-
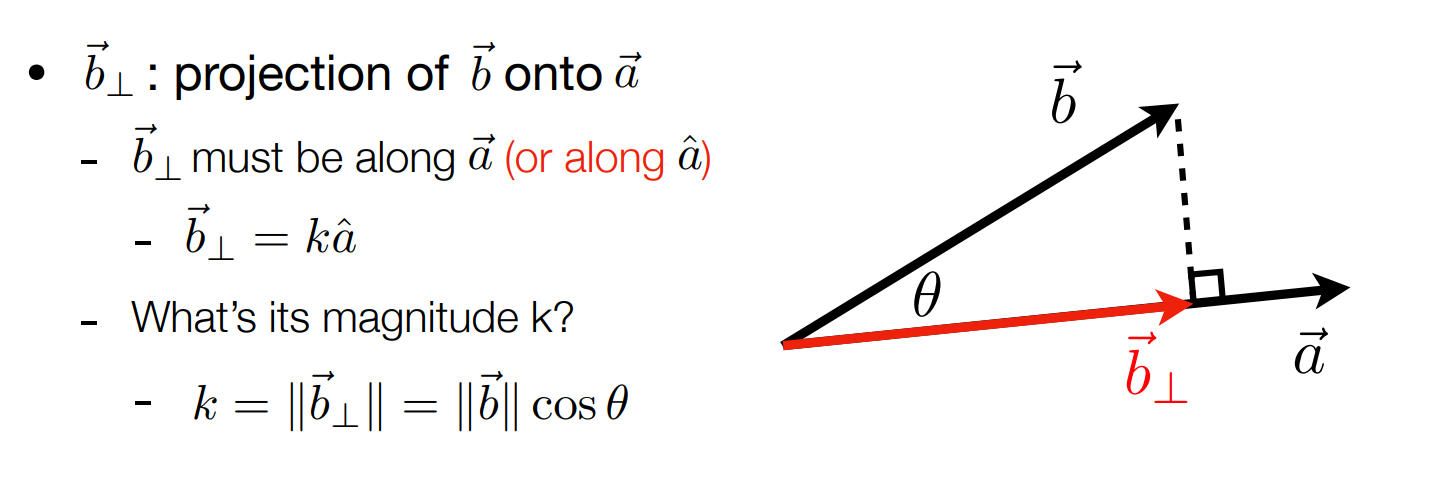
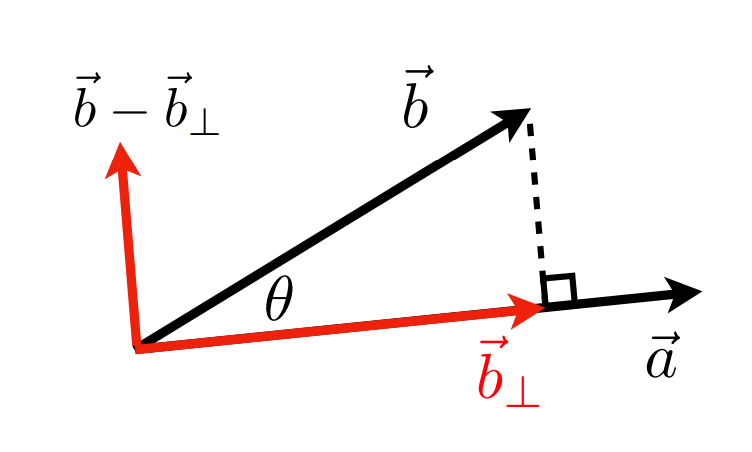
点乘的投影:
-
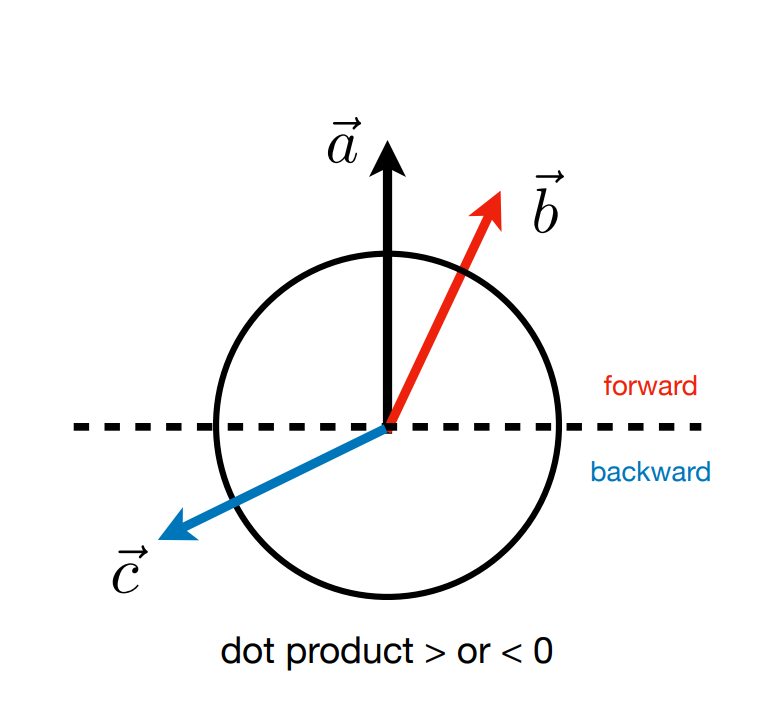
点乘的应用:
- 度量两个向量方向是否接近(如果两个都是单位向量,点乘为1则方向十分接近,为0则是相互垂直,为-1,则方向相反)
- 分解向量
- 判断方向是向前还是向后
6. 向量叉乘Cross product
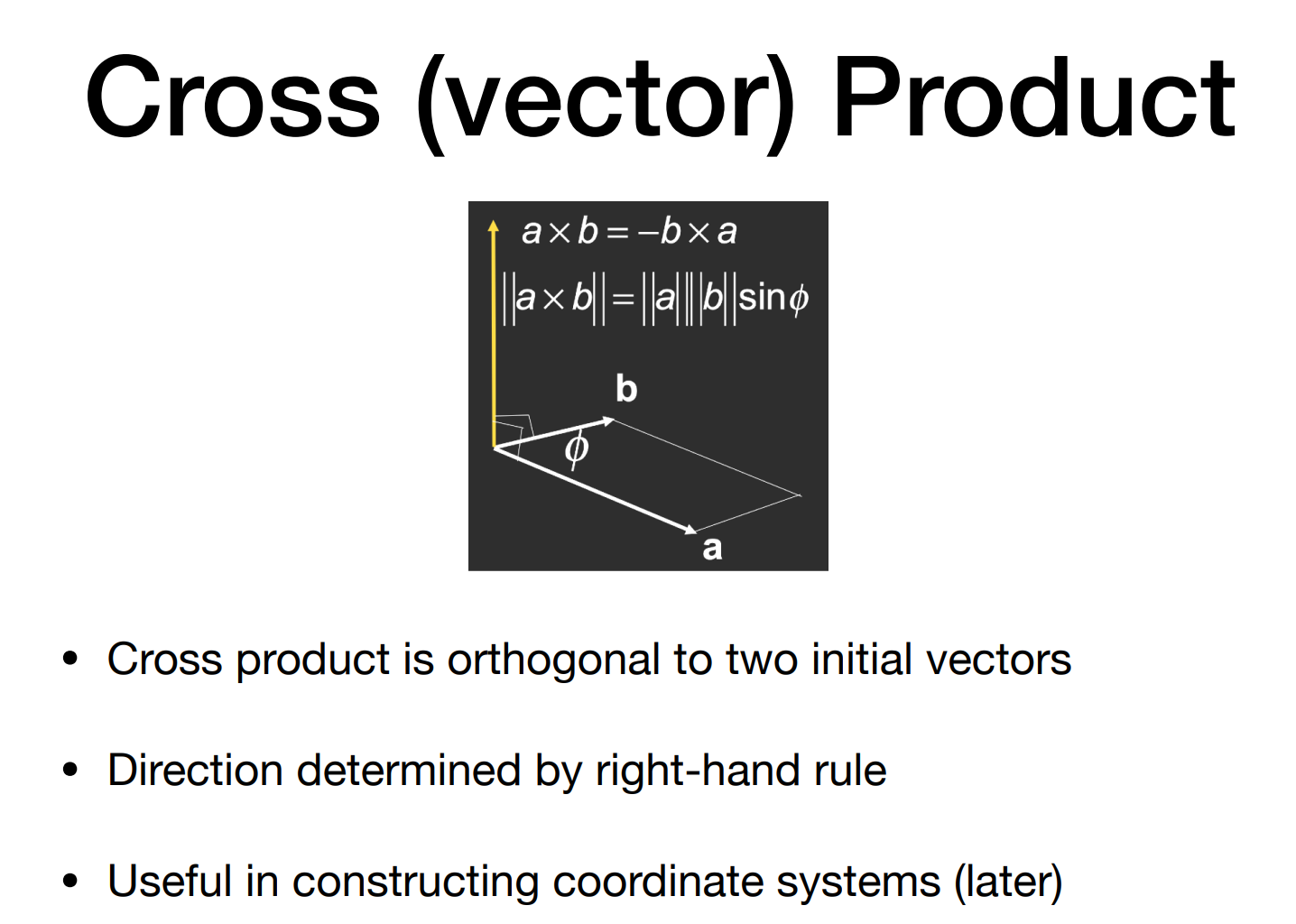 向量叉乘的结果垂直于原来的两个向量;通过右手定则确定叉乘的结果的方向;在构造坐标系的时候非常有用
向量叉乘的结果垂直于原来的两个向量;通过右手定则确定叉乘的结果的方向;在构造坐标系的时候非常有用
-
性质: \(\begin{array}{lc} \vec{x} \times \vec{y}=+\vec{z} & \vec{a} \times \vec{b}=-\vec{b} \times \vec{a} \\ \vec{y} \times \vec{x}=-\vec{z} & \vec{a} \times \vec{a}=\overrightarrow{0} \\ \vec{y} \times \vec{z}=+\vec{x} & \vec{a} \times(\vec{b}+\vec{c})=\vec{a} \times \vec{b}+\vec{a} \times \vec{c} \\ \vec{z} \times \vec{y}=-\vec{x} & \vec{a} \times(k \vec{b})=k(\vec{a} \times \vec{b}) \\ \vec{z} \times \vec{x}=+\vec{y} & \\ \vec{x} \times \vec{z}=-\vec{y} & \end{array}\)
-
笛卡尔坐标系下表示 \(\vec{a} \times \vec{b}=\left(\begin{array}{c} y_{a} z_{b}-y_{b} z_{a} \\ z_{a} x_{b}-x_{a} z_{b} \\ x_{a} y_{b}-y_{a} x_{b} \end{array}\right) \newline \vec{a} \times \vec{b}=A^{*} b=\left(\begin{array}{ccc}0 & -z_{a} & y_{a} \\ z_{a} & 0 & -x_{a} \\ -y_{a} & x_{a} & 0\end{array}\right)\left(\begin{array}{l}x_{b} \\ y_{b} \\ z_{b}\end{array}\right)\)
-
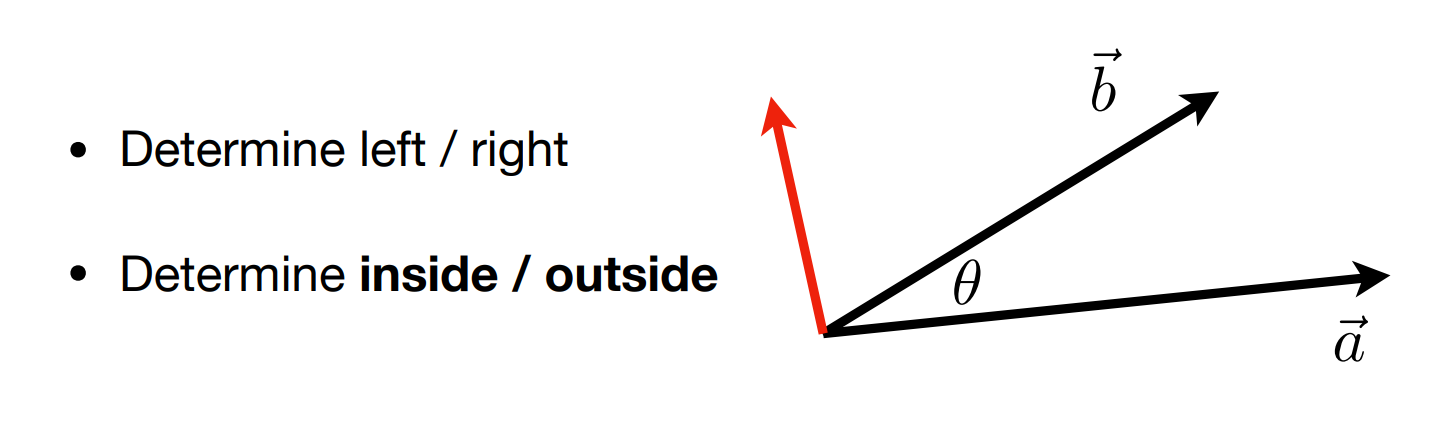
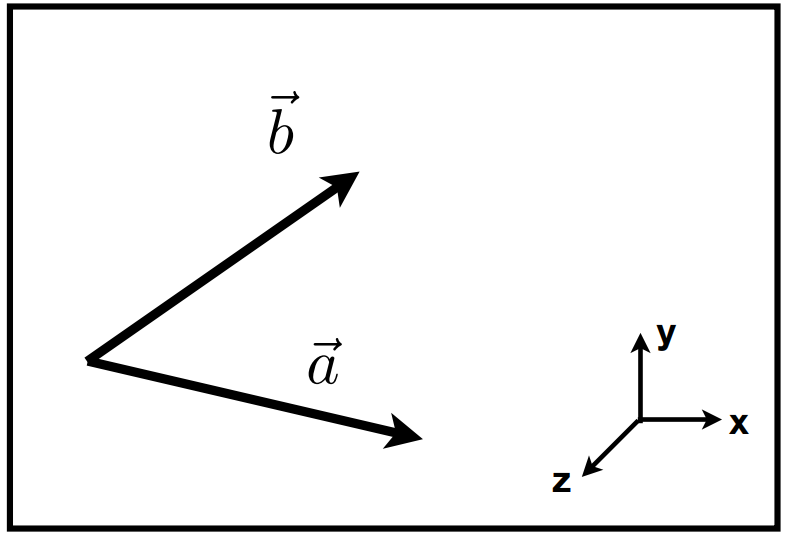
几何意义
- 判断左右方向
-
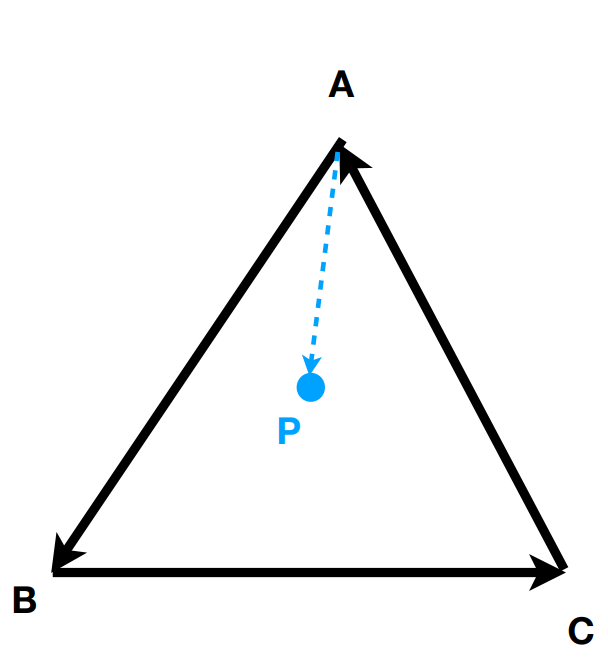
判断点在图形外部还是内部
比如下面的点p在三角形内部
7. 正交基坐标系
三维正交坐标系: \(\begin{array}{l} \|\vec{u}\|=\|\vec{v}\|=\|\vec{w}\|=1\\ \vec{u} \cdot \vec{v}=\vec{v} \cdot \vec{w}=\vec{u} \cdot \vec{w}=0\\ \vec{w}=\vec{u} \times \vec{v} \text { (right-handed) }\\ \vec{p}=(\vec{p} \cdot \vec{u}) \vec{u}+(\vec{p} \cdot \vec{v}) \vec{v}+(\vec{p} \cdot \vec{w}) \vec{w}\\ \text { (projection) } \end{array}\)
矩阵Matrices
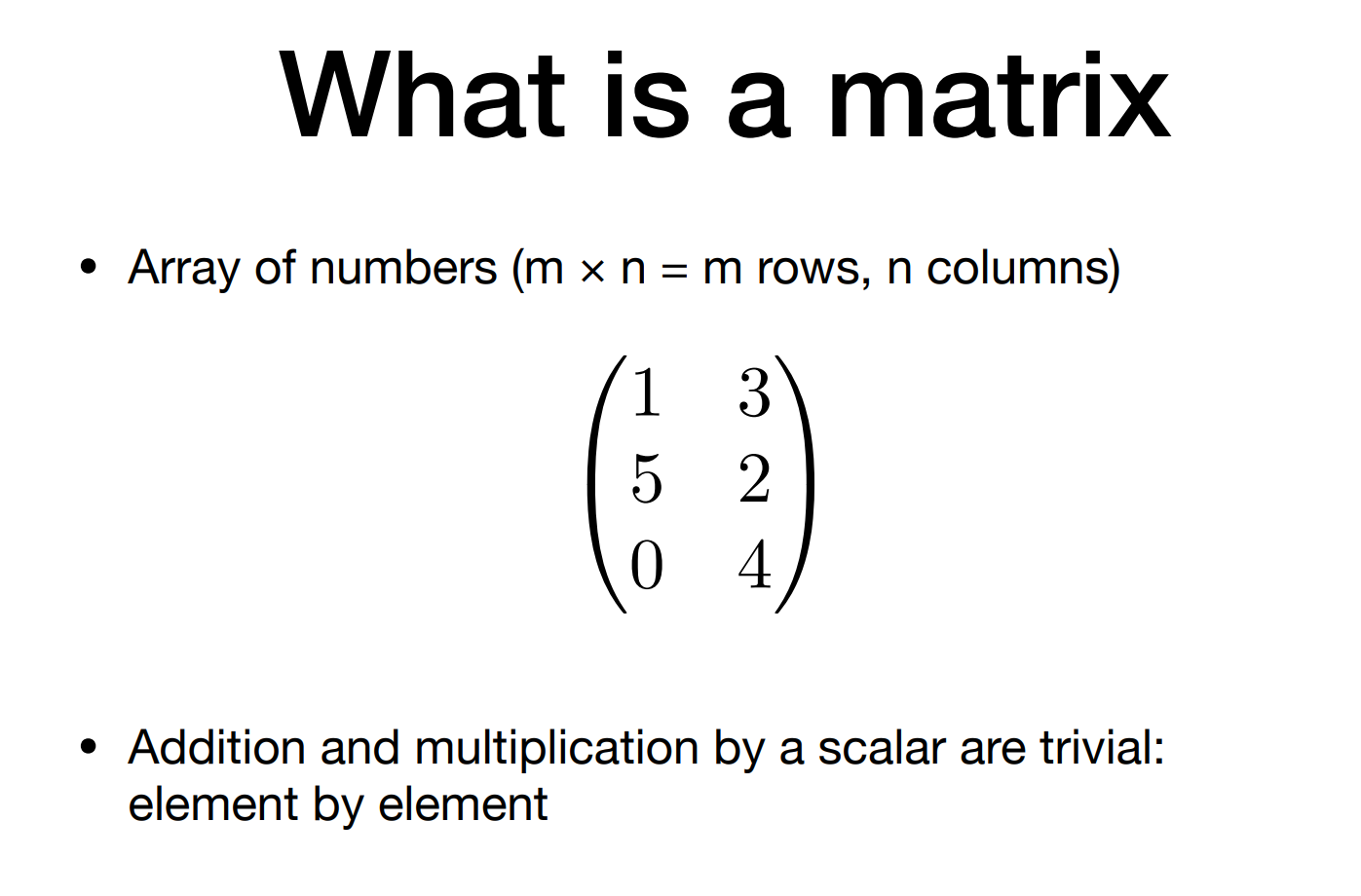
- 什么是矩阵?
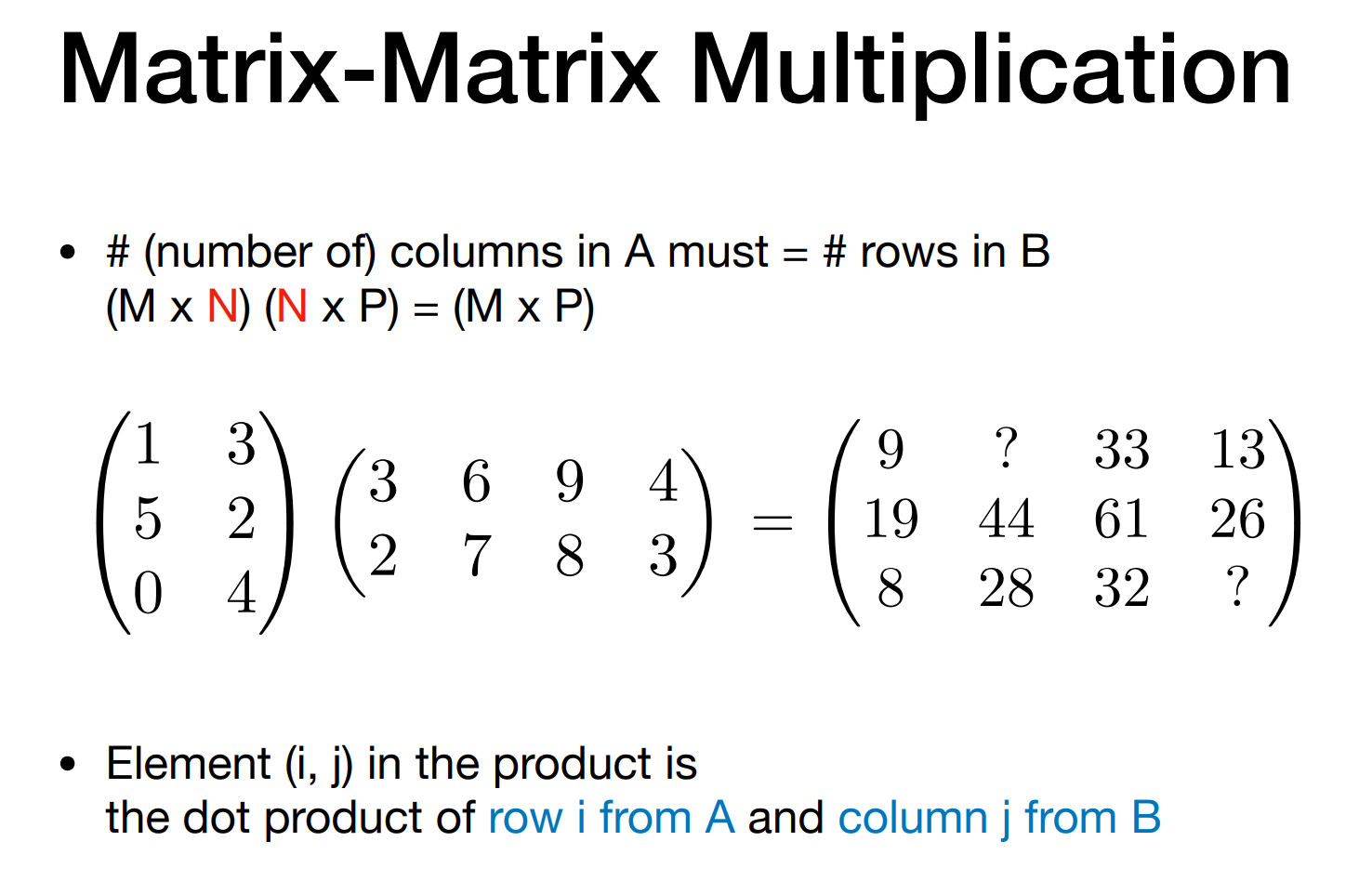
- 矩阵乘法
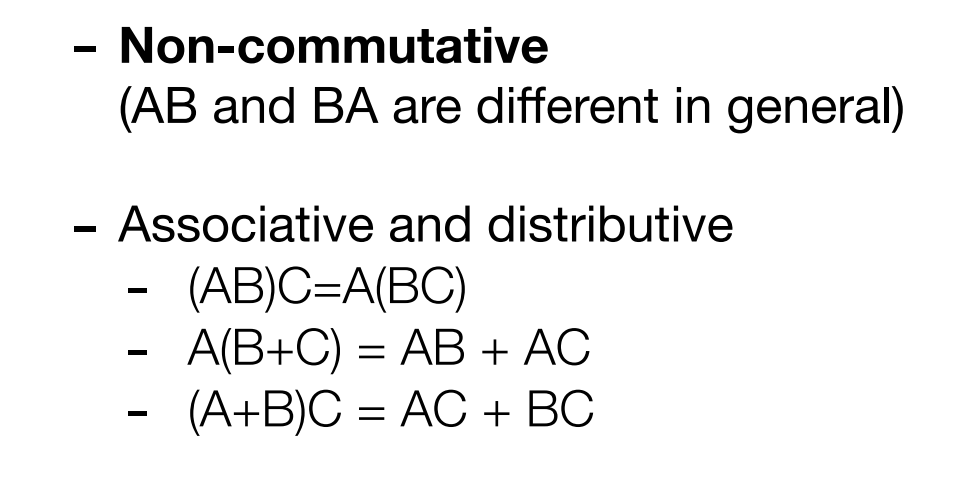
- 矩阵乘法的性质
- 不满足对称性
- 结合律和分配律都满足
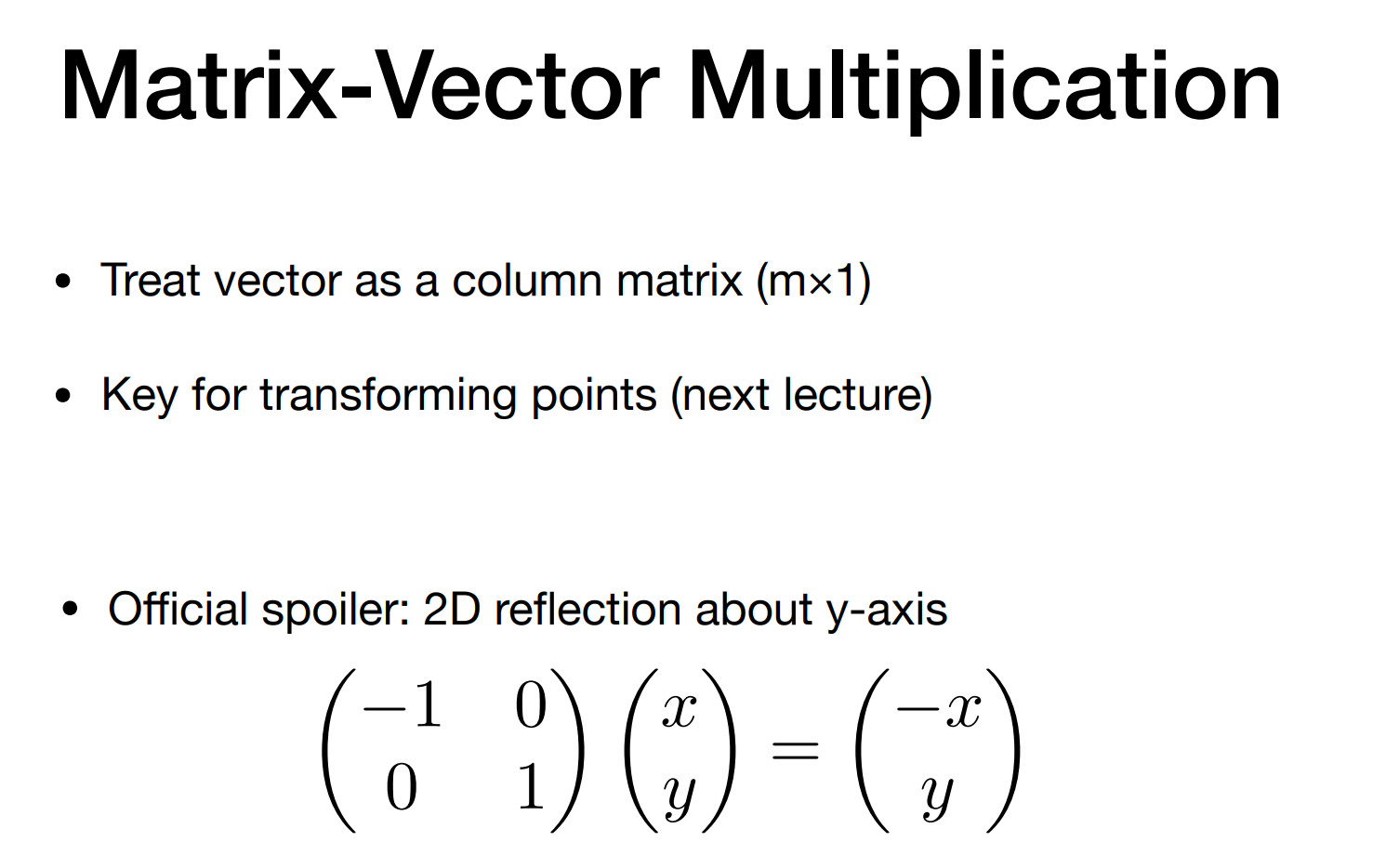
- 矩阵向量相乘
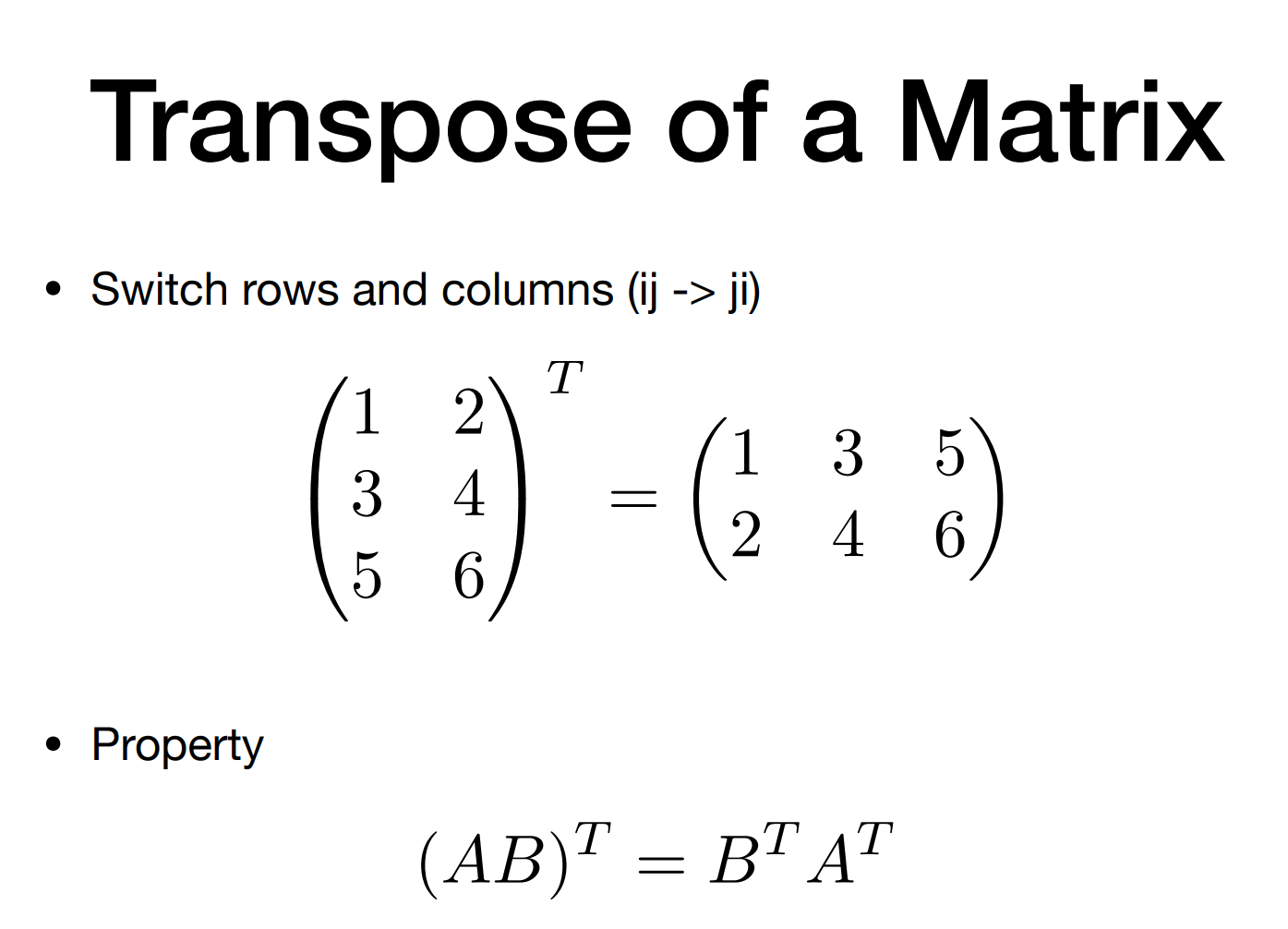
- 矩阵转置
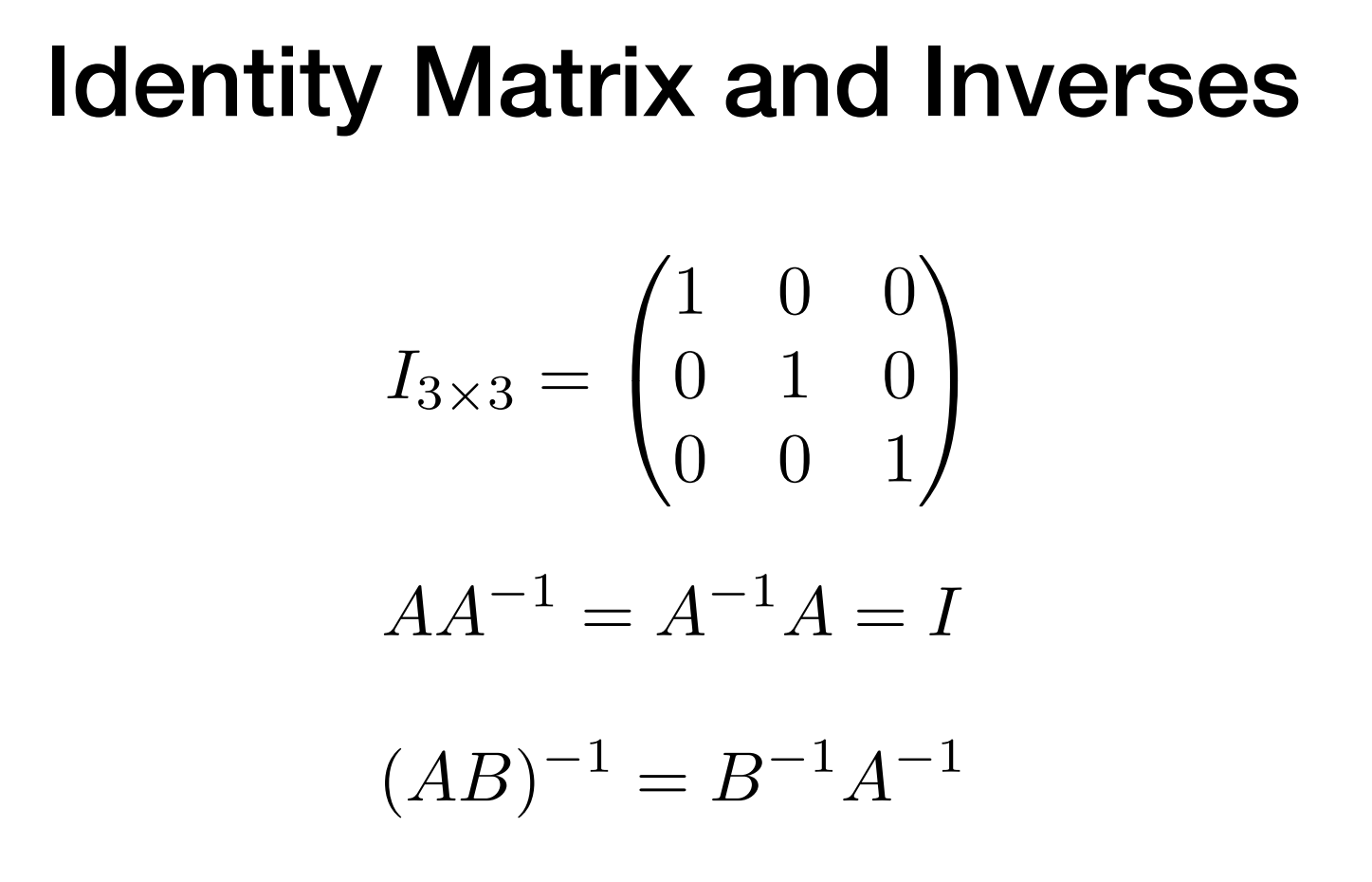
- 单位矩阵和逆
- 向量乘法的矩阵表达